

Miękkie, inteligentne soczewki kontaktowe z integracją obwodów bezprzewodowych, czujników glukozy i wyświetlaczy
Abstrakt
Najnowsze postępy w elektronice do noszenia w połączeniu z komunikacją bezprzewodową są niezbędne do realizacji zastosowań medycznych za pomocą technologii monitorowania zdrowia. Na przykład inteligentna soczewka kontaktowa, która jest w stanie monitorować informacje fizjologiczne oka i płynu łzowego, może zapewnić nieinwazyjną diagnostykę medyczną w czasie rzeczywistym. Jednak wcześniejsze doniesienia dotyczące inteligentnych soczewek kontaktowych wskazywały, że nieprzezroczyste i kruche elementy zostały użyte do umożliwienia działania urządzenia elektronicznego, co może blokować wzrok użytkownika i potencjalnie uszkodzić oko. Ponadto użycie drogiego i nieporęcznego sprzętu do pomiaru sygnałów z czujników soczewek kontaktowych może zakłócać działania zewnętrzne użytkownika. W związku z tym zgłaszamy niekonwencjonalne podejście do wytwarzania miękkiej, inteligentnej soczewki kontaktowej, w której czujniki glukozy, obwody bezprzewodowego transferu mocy i piksele wyświetlacza do wizualizacji sygnałów detekcyjnych w czasie rzeczywistym są w pełni zintegrowane przy użyciu przezroczystych i rozciągliwych nanostruktur. Integracja tego wyświetlacza z inteligentnym obiektywem eliminuje potrzebę stosowania dodatkowego, nieporęcznego sprzętu pomiarowego. Ta miękka, inteligentna soczewka kontaktowa może być przezroczysta, zapewniając wyraźny widok poprzez dopasowanie współczynników załamania lokalnie wzorzystych obszarów. Powstała miękka, inteligentna soczewka kontaktowa zapewnia bezprzewodową pracę w czasie rzeczywistym, a testy in vivo monitorują stężenie glukozy we łzach (odpowiednie do określania poziomu glukozy na czczo we łzach pacjentów z cukrzycą) i jednocześnie zapewniają wyniki wykrywania za pośrednictwem wyświetlacza soczewek kontaktowych.
WPROWADZENIE
Elektroniczne urządzenia do noszenia zdolne do monitorowania ludzkiego ciała w czasie rzeczywistym mogą zapewnić nowe sposoby zarządzania stanem zdrowia i wydajnością jednostek (1-7). Rozciągliwa i przypominająca skórę elektronika w połączeniu z komunikacją bezprzewodową umożliwia nieinwazyjne i wygodne pomiary fizjologiczne, zastępując konwencjonalne metody wykorzystujące igły penetrujące, sztywne płytki drukowane, połączenia zaciskowe i zasilacze (8-12). Biorąc pod uwagę to tło, inteligentne soczewki kontaktowe są obiecującym przykładem urządzenia do noszenia na ciele i monitorowania zdrowia (13, 14). Niezawodność i stabilność miękkich soczewek kontaktowych została szeroko zbadana i poczyniono znaczne postępy w celu zminimalizowania podrażnienia oka, aby zmaksymalizować komfort użytkownika. Ponadto łzy użytkownika można zbierać w soczewce kontaktowej za pomocą całkowicie naturalnych środków, takich jak normalne wydzielanie i mruganie, i wykorzystywane do oceny różnych biomarkerów znajdujących się we krwi, takich jak glukoza, cholesterol, jony sodu i jony potasu (13). W ten sposób soczewki wyposażone w czujniki mogą zapewnić nieinwazyjne metody ciągłego wykrywania metabolitów we łzach. Wśród różnych biomarkerów nieinwazyjne wykrywanie poziomu glukozy w diagnostyce cukrzycy badano na wiele sposobów, aby zastąpić konwencjonalne inwazyjne testy diagnostyczne (na przykład nakłuwanie palca w celu pobrania krwi), jak przedstawiono w tabeli S1. Biorąc pod uwagę korelację między poziomem glukozy łzy a poziomem glukozy we krwi (15), czujnik glukozy zamontowany na soczewce kontaktowej może zapewnić nieinwazyjne monitorowanie poziomu glukozy użytkownika z płynów łzowych z uwzględnieniem czasu opóźnienia między poziomem glukozy łzy a poziomem glukozy we krwi w zakresie od 10 do 20 minut (13-16).
Chociaż taki system zapewnia wiele możliwości, istnieją pewne kluczowe kwestie, które należy rozwiązać, zanim możliwe będzie praktyczne zastosowanie inteligentnych soczewek kontaktowych. Kwestie te obejmują (i) stosowanie nieprzezroczystych materiałów elektronicznych do czujników, układów scalonych (IC), metalowych anten i interkonektów, które mogą blokować wzrok użytkowników (15, 17, 18); (ii) integracja elementów urządzenia elektronicznego na płaskich i plastikowych podłożach, skutkująca odkształceniami po przekształceniu soczewek w zakrzywiony kształt, tworząc w ten sposób ciała obce, które mogą podrażniać oczy i powieki użytkowników (19); (iii) kruche i sztywne materiały zintegrowanego systemu elektronicznego, takie jak montowane powierzchniowo układy scalone i sztywne połączenia, które mogłyby uszkodzić rogówkę lub powiekę (20–22); oraz (iv) wymóg dotyczący nieporęcznego i drogiego sprzętu do pomiaru sygnału, który ogranicza stosowanie inteligentnych soczewek kontaktowych poza laboratoriami badawczymi lub placówkami klinicznymi poprzez ograniczenie aktywności zewnętrznej użytkowników (14, 15, 20, 23).
Ze wszystkich powodów wymienionych powyżej wprowadziliśmy niekonwencjonalne podejście do wytwarzania miękkich, inteligentnych soczewek kontaktowych, w których wszystkie elementy elektroniczne są zaprojektowane z myślą o normalnej użyteczności. Na przykład widoczność użytkownika nie będzie zasłonięta, ponieważ soczewki kontaktowe są wykonane z przezroczystych nanomateriałów. Ponadto soczewki te zapewniają doskonałą niezawodność, ponieważ mogą ulegać mechanicznym odkształceniom wymaganym do dopasowania ich do miękkiej soczewki bez uszkodzenia. Płaskie, siatkowe struktury elementów urządzenia i ich interkonekty zapewniają wysoką rozciągliwość zakrzywionej miękkiej soczewki bez wyboczenia. Ponadto piksele wyświetlacza zintegrowane z inteligentną soczewką kontaktową umożliwiają dostęp do danych z czujników w czasie rzeczywistym, aby wyeliminować potrzebę stosowania dodatkowego sprzętu pomiarowego.
Aby osiągnąć te cele, zastosowaliśmy trzy strategie, jak opisano w następujący sposób: (i) Do projektowania miękkich soczewek kontaktowych utworzyliśmy miękkie soczewki kontaktowe o wysoce przezroczystych i przestrajalnych strukturach hybrydowych, które składają się z mechanicznie wzmocnionych wysp do lokalizowania dyskretnych urządzeń elektronicznych (takich jak obwody prostownicze i piksele wyświetlacza) i elastycznych połączeń w celu zlokalizowania rozciągliwego, przezroczysta antena i elektrody interkonektowe. Wzmocnione ramy z małymi segmentami zostały wykonane z foto-wzorzystego polimeru, a elastyczne części zostały uformowane przy użyciu silikonowego elastomeru, konwencjonalnego materiału na miękką soczewkę kontaktową. Ta soczewka kontaktowa oparta na podłożu hybrydowym, w którym wzmocnione wyspy zostały osadzone wewnątrz elastycznej warstwy, może skutecznie rozprowadzać naprężenia mechaniczne i chronić zwykłą elektronikę przed mechanicznymi deformacjami miękkiej soczewki. Chociaż koncepcja stosowania podłoży hybrydowych do rozciągliwej elektroniki została już wcześniej zgłoszona, zastosowanie podłoży hybrydowych może znacznie pogorszyć właściwości optyczne powstałych folii, pozostawiając je z niską przezroczystością i wysokim zamgleniem ze względu na różnicę współczynników załamania światła (n) materiałów heterogenicznych (24-29 ). Oczywiście soczewki kontaktowe nie powinny zasłaniać użytkownikowi wzroku i muszą mieć zarówno wysoką przezroczystość, jak i niskie zamglenie, aby uzyskać przejrzystość optyczną. Tak więc nasze podłoże hybrydowe składa się z niejednorodnych materiałów o znikomych odchyleniach współczynników załamania części zbrojonych i elastomeru (Δn = ~ 0,003). To podejście do dopasowywania indeksów może zapewnić użytkownikowi wyraźny widok, to znaczy wyjątkową przezroczystość (93% w reżimie światła widzialnego) i niskie zamglenie (1,6% w reżimie światła widzialnego). Ponadto część elastyczna (konwencjonalny materiał miękkich soczewek kontaktowych) została zmaksymalizowana (ponad 96,7%) w całkowitej powierzchni soczewki kontaktowej dla wysokiej przepuszczalności tlenu (Dk 340,0 U). (ii) W przypadku rozciągliwych i przezroczystych elektrod do anten i interkonektów, elektrody dla tych pasywnych komponentów zajmują stosunkowo duże obszary końcowego układu scalonego, więc muszą mieć wysoką przezroczystość i rozciągliwość, aby mogły zostać ukształtowane w miękką soczewkę (14, 30-32). Tak więc jednowymiarowe (1D), ultradługie nanowłókna metalowe (mNF) były bezpośrednio elektroprzędzone jako ciągłe sieci w celu utworzenia przezroczystych i rozciągliwych elektrod (33). Transport ładunku odbywa się wzdłuż tych metalicznych ścieżek 1D, a ich ultradługa długość ułatwia zmniejszenie rezystancji blachy (Rs) poprzez zminimalizowanie liczby połączeń między włóknami metalowymi. Na przykład losowe sieci tych elektrospun mNF mogą prezentować szeroki zakres wyższego Rs i przezroczystość (~1,3 om/m² przy transmitancji 90% lub ~0,3 omów/m² przy transmitancji 72% w reżimie widzialnej długości fali) poprzez modulację ułamka powierzchni mNF. Ponadto wykazują również wyjątkową rozciągliwość (~30% w odkształceniu rozciągającym), dzięki czemu mogą być odpowiednie jako elektrody do interkonektów w miękkich, inteligentnych soczewkach kontaktowych. W szczególności ich rozciągliwość w płaszczyźnie może zapobiegać mechanicznemu wyboczeniu urządzeń na miękkiej soczewce, aby opóźnić podrażnienie oka lub powieki spowodowane uczuciem obecności ciał obcych. (iii) W przypadku bezprzewodowych pikseli wyświetlających do wizualizacji poziomu glukozy w czasie rzeczywistym, po wykryciu przez czujnik grafenowy stężenia glukozy we łzach, przezroczysta i rozciągliwa antena z prostownikiem napędza piksele diody elektroluminescencyjnej (LED) w celu bezprzewodowego wyświetlania informacji o wykrywaniu w czasie rzeczywistym. Na przykład w tym systemie obwodów bezprzewodowych płyny łzowe o stężeniu glukozy powyżej progu wyłączą piksel LED. Jest to pierwsze podejście do zastosowania piksela wyświetlacza w miękkiej soczewce kontaktowej w celu wizualizacji wykrywania glukozy, które można wykorzystać do badania przesiewowego stanu przedcukrzycowego i codziennego monitorowania poziomu glukozy, bez konieczności stosowania dodatkowego, nieporęcznego i drogiego sprzętu pomiarowego.
Ponadto bezprzewodowe działanie tej inteligentnej soczewki kontaktowej może stabilnie utrzymywać temperaturę oka bez nagłego ogrzewania, zapewniając bezpieczeństwo oczu użytkownika. Ponadto testy in vivo z wykorzystaniem żywego królika wykazały jego niezawodne działanie bez zauważalnych działań niepożądanych. Dlatego ta miękka, inteligentna soczewka kontaktowa stanowi platformę do bezprzewodowego, ciągłego i nieinwazyjnego monitorowania stanów fizjologicznych, a także wykrywania biomarkerów związanych z chorobami oczu i innymi. Ponadto oferuje możliwość rozszerzenia możliwości zastosowania w innych obszarach, takich jak inteligentne urządzenia do dostarczania leków i rzeczywistość rozszerzona.
WYNIKI
Miękki, inteligentny system soczewek kontaktowych wykorzystujący rozciągliwe i przezroczyste urządzenia
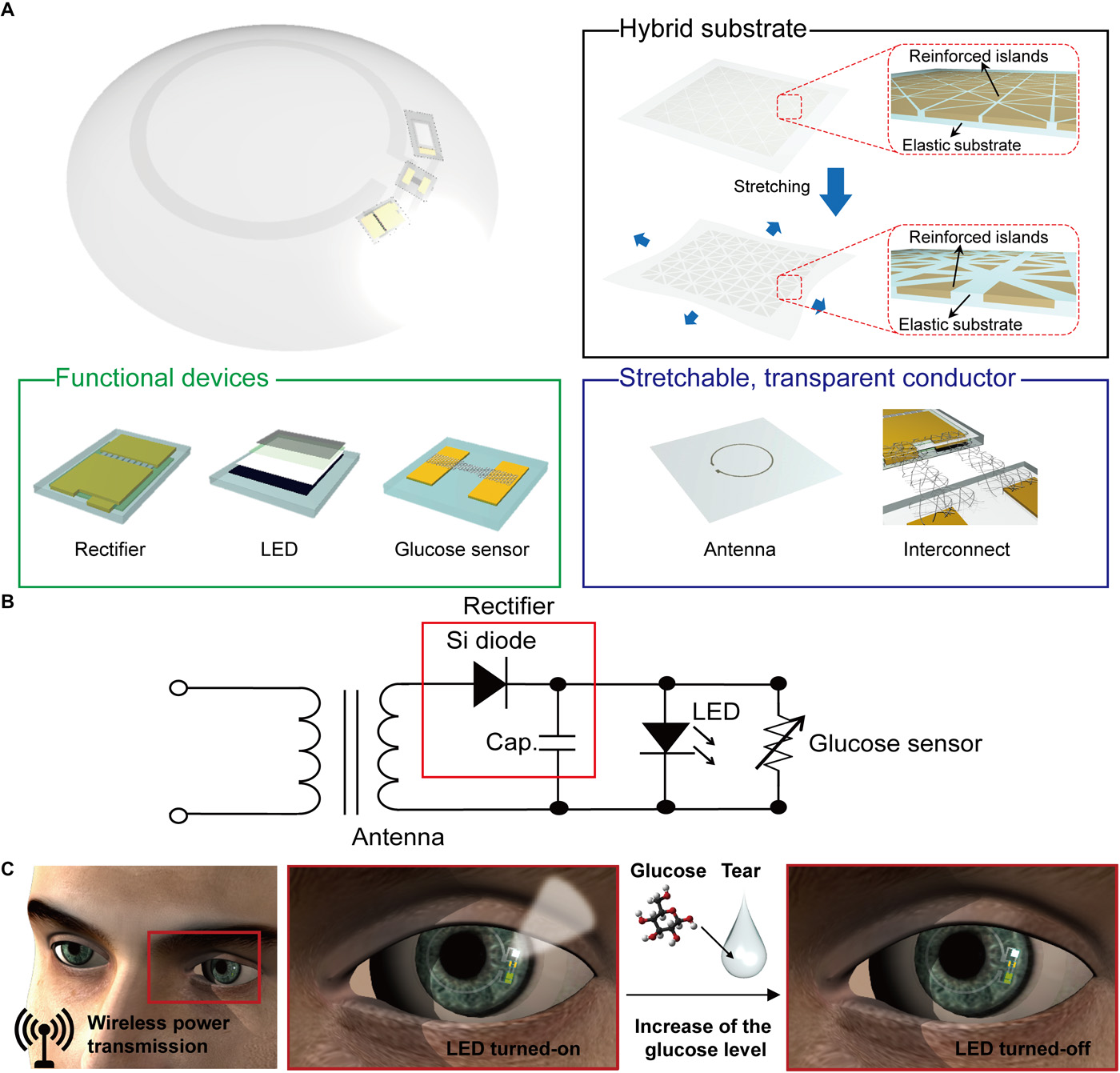
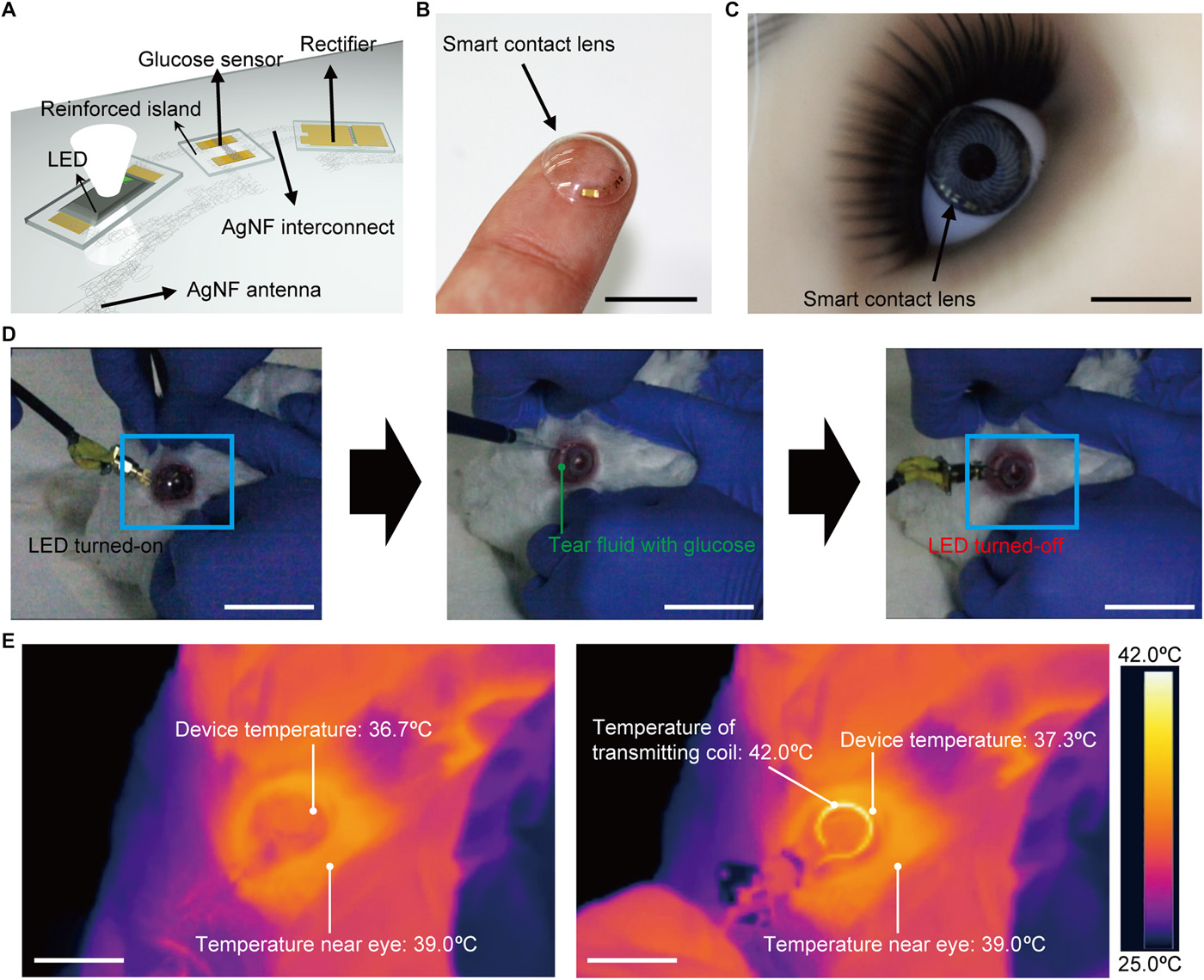
Rysunek 1A pokazuje układy miękkich, inteligentnych soczewek kontaktowych, w których czujnik glukozy, obwód bezprzewodowego transferu mocy i piksel wyświetlacza są w pełni zintegrowane za pomocą przezroczystych i rozciągliwych interkonektów. Główną koncepcją tego miękkiego, inteligentnego systemu soczewek kontaktowych jest możliwość bezprzewodowego monitorowania stanu zdrowia użytkownika (czyli poziomu glukozy we łzach) za pomocą piksela LED. Do pracy bezprzewodowej przezroczysta i rozciągliwa antena indukcyjna i obwód prostownika zostały użyte w tym systemie jako obwód transferu mocy. Ten obwód przenoszenia mocy może bezprzewodowo odbierać moc za pomocą sygnałów prądu przemiennego za pomocą tej anteny. Prostownik, który składa się z diod Si i kondensatora, jest zintegrowany z anteną w celu konwersji sygnału prądu przemiennego na dc. Więcej szczegółów na temat ich etapów wytwarzania znajduje się w Dodatkowych materiałach i metodach. Wyprostowane zasilanie prądu stałego włącza piksel LED i czujnik glukozy. Przestrajalne struktury hybrydowe podłoża (z mechanicznie wzmocnionymi wyspami i elastycznymi połączeniami) służą do ochrony tych urządzeń elektronicznych przed mechanicznymi deformacjami miękkiej soczewki. Obwód prostownika, czujnik glukozy i piksel LED znajdują się na wzmocnionych obszarach tego hybrydowego podłoża. Ponadto rozciągliwa antena i interkonekty są tworzone na elastycznych obszarach, które składają się z elastomeru silikonowego, komercyjnego materiału do miękkich soczewek kontaktowych. Po pełnej integracji z czujnikiem glukozy i pikselem LED, przekształcenie powstałej próbki z urządzeniami w kształt soczewki kończy wytwarzanie miękkiej, inteligentnej soczewki kontaktowej. Więcej szczegółów tej procedury wytwarzania przedstawiono w materiałach i metodach oraz w filmie S1.
Rys. 1 Rozciągliwy, przezroczysty system inteligentnych soczewek kontaktowych.
(A) Schematyczna ilustracja miękkich, inteligentnych soczewek kontaktowych. Miękka, inteligentna soczewka kontaktowa składa się z hybrydowego podłoża, urządzeń funkcjonalnych (prostownika, diody LED i czujnika glukozy) oraz przezroczystego, rozciągliwego przewodnika (do anteny i interkonektów). (B) Schemat obwodu systemu inteligentnych soczewek kontaktowych. (C) Działanie tej miękkiej, inteligentnej soczewki kontaktowej. Energia elektryczna jest bezprzewodowo przesyłana do obiektywu przez antenę. Ta moc aktywuje piksel LED i czujnik glukozy. Po wykryciu poziomu glukozy w płynie łzowym powyżej progu piksel ten wyłącza się.
Rysunek 1B pokazuje schemat obwodu inteligentnej soczewki kontaktowej. W tym inteligentnym obiektywie antena odbiera sygnały o częstotliwości radiowej (RF) z nadajnika (odległość transmisji, <9 mm), a prostownik [kombinacja diody i kondensatora (Cap.)] przekształca sygnały prądu przemiennego w prąd stały, aby włączyć diodę LED i obsługiwać czujnik. Główny mechanizm tej soczewki kontaktowej do wykrywania poziomu glukozy zilustrowano na ryc. 1C. Ekspozycja na płyn łzowy o stężeniu glukozy powyżej progu powoduje zmniejszenie rezystancji czujnika. To zmniejszenie rezystancji czujnika zmniejsza rezystancję obwodu równoległego diody LED i czujnika, podczas gdy rezystancja innych elementów (anteny i prostownika) w systemie jest stała. Odchylenie przyłożone do obwodu równoległego diody LED i czujnika zmniejsza się w warunkach stale przyłożonego napięcia. Ta różnica w odchyleniu zastosowanym do piksela LED może go włączyć lub wyłączyć.
Rozciągliwe i przezroczyste podłoże hybrydowe
Aby zastosować sztywne urządzenia elektroniczne (na przykład piksel LED i obwód prostownika z diodami Si i kondensatorem) w rozciągliwym systemie, należy zmniejszyć obciążenie mechaniczne i zmęczenie stosowane w tych urządzeniach. W tym celu uformowano podłoże o strukturze hybrydowej, w której mechanicznie wzmocnione wyspy osadzone są wewnątrz odwracalnie elastycznej warstwy. Rysunek 2A ilustruje to hybrydowe podłoże przed lub po rozciągnięciu. Do wytwarzania tego hybrydowego podłoża mechanicznie wzmocnione wyspy (OP) fotoutwardzalnego polimeru optycznego (SPC-414; EOP = ~360 MPa) zostały fotolitograficznie wzorowane z mikrometrami o rozmiarach (grubość, ~50 μm) na warstwie protektorowej Cu o grubości 800 nm. Następnie warstwa elastomeru silikonowego (LENS) materiału miękkich soczewek kontaktowych (elastofilcon A; ESOCZEWKA = ~0,09 MPa) powlekano kolejno w celu osadzenia tych wzmocnionych części o grubości ~100 μm. Wyeliminowanie warstwy protektorowej Cu zakończyło tworzenie podłoża hybrydowego. Więcej szczegółów na temat tej procedury wytwarzania podano w materiałach i metodach oraz na rys. S1.
Rys. 2 Właściwości rozciągliwego i przezroczystego podłoża hybrydowego.
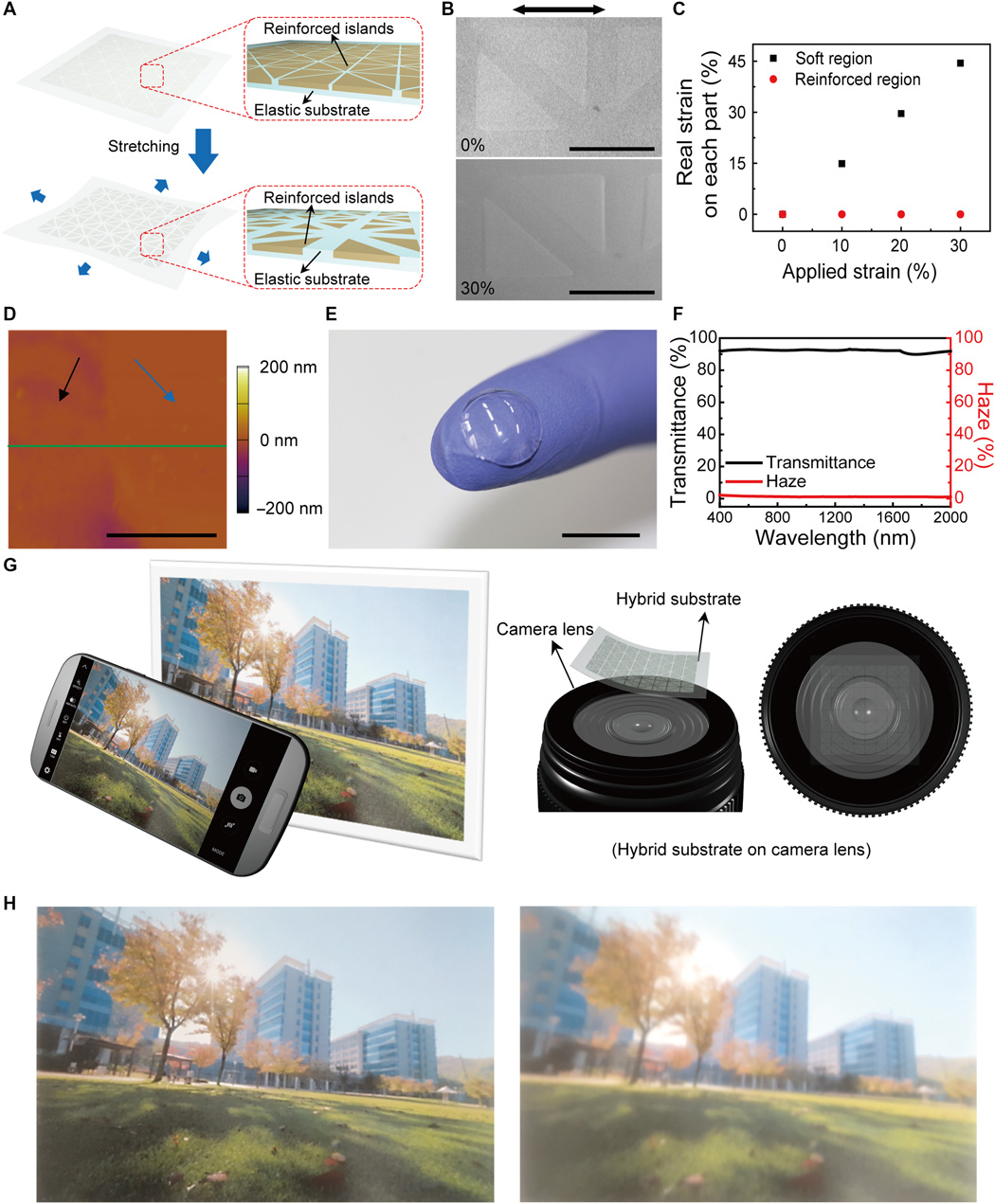
(A) Schematyczny obraz podłoża hybrydowego, w którym wzmocnione wyspy są osadzone w podłożu elastycznym. (B) Obrazy SEM przed (u góry) i podczas (na dole) rozciągania 30%. Strzałka wskazuje kierunek rozciągania. Podziałki, 500 μm. (C) Efektywne odkształcenia każdej części wzdłuż kierunku rozciągania wskazanego w lit. B). (D) Obraz AFM podłoża hybrydowego. Czarne i niebieskie strzałki wskazują odpowiednio elastyczny region i wzmocnioną wyspę. Pasek podziałki, 5 μm. (E) Zdjęcie podłoży hybrydowych formowanych w kształt soczewek kontaktowych. Pasek skali, 1 cm. (F) Widma przepuszczalności optycznej (czarnej) i zamglenia (czerwonej) podłoża hybrydowego. (G) Schematyczny schemat metody fotografowania w celu określenia przejrzystości optycznej podłoży hybrydowych. (H) Zdjęcia wykonane aparatem, w których na obiektywie aparatu znajduje się podłoże hybrydowe oparte na obiektywie OP-LENS (po lewej) i podłoże hybrydowe oparte na obiektywie SU8 (po prawej).
Zdolność do redukcji naprężeń mechanicznych stosowanych na tych wyspach została potwierdzona testem rozciągania tego hybrydowego podłoża (rys. 2, B i C). Chociaż ta hybrydowa folia była rozciągnięta do 30% w odkształceniu rozciągającym, na wzmocnionych wyspach zastosowano znikome odkształcenie (~ 0%), a obszar sprężysty został rozciągnięty głównie z powodu znacznej różnicy w module Younga (24, 27, 28). Ponadto rys. 2B pokazuje, że nie było przerw na styku między tymi heterogenicznymi regionami nawet podczas stanów rozciągania (30% w odkształceniu rozciągającym). W związku z tym wyniki te wskazują, że nasz hybrydowy system substratów może zapewnić wystarczającą rozciągliwość w całym regionie, podczas gdy kruche urządzenia nieorganiczne (LED, dioda Si i kondensator do prostownika), które znajdują się na wzmocnionych wyspach, mogą być chronione przed odkształceniami mechanicznymi.
Rysunek 2D i rys. S2 przedstawia obrazy mikroskopii sił atomowych (AFM) i skaningowej mikroskopii elektronowej (SEM) podłoża hybrydowego z ciągłymi interfejsami między obszarami wzmocnionymi i elastycznymi. Zmierzono chropowatość powierzchni średniej kwadratowej (rms) całego reżimu i różnicę wysokości na tym interfejsie i stwierdzono, że jest ona mniejsza niż odpowiednio 3 i 5 nm. Ten prawie płaski interfejs jest korzystny w zmniejszaniu rozpraszania światła z powierzchni międzyfazowej i jest w bliskim kontakcie z maskami do fotolitografii. Ponadto właściwości optyczne tej hybrydowej folii, takie jak jej przezroczystość i zamglenie, są również ważne dla jej zastosowania jako soczewki kontaktowej. Różnica we współczynnikach załamania wzmocnionych wysp i elastycznych części może powodować rozpraszanie światła i zmniejszać przezroczystość optyczną poprzez zwiększenie zamglenia, co zakłóci wzrok użytkownika (34). Dlatego współczynniki załamania elastomeru silikonowego (n = 1,41) i fotoutwardzalnego polimeru optycznego dla wzmocnionych wzorów (n = 1,407) są podobnie dopasowane. Jako przykład rys. 2E pokazuje zdjęcie przezroczystej soczewki kontaktowej wyprodukowanej przy użyciu tej hybrydowej folii. Folia ta (grubość, 100 μm) składała się z 6 × 6 tablic wzmocnionych wzorów (para trójkąta prostokątnego, z których każdy mierzył 500 μm długości i 50 μm grubości) o elastycznej przestrzeni 200 μm, a część elastomerowa zajmowała ~40% całej powierzchni folii. Rysunek 2F pokazuje, że to hybrydowe podłoże wykazywało doskonałą przepuszczalność optyczną (~93% przy 550 nm) i niskie zamglenie (~1,6% przy 550 nm). Ta niska wartość zamglenia hybrydy była podobna do przypadku nagiej warstwy elastomerowej bez niejednorodnej części (~1,3% przy 550 nm; rys. S3). Ponadto podłoże hybrydowe zachowało swoją przepuszczalność i zamglenie przed rozciąganiem mechanicznym (od 0 do 30% w odkształceniu rozciągającym) (rys. S4).
Aby pokazać wpływ współczynnika załamania światła na wzrok użytkownika, uformowano dwa różne rodzaje folii hybrydowych przy użyciu tego samego elastomeru silikonowego, to znaczy (i) jeden z użyciem OP jako części wzmocnionych i (ii) drugi przy użyciu polimeru epoksydowego SU8 jako części wzmocnionych (n = 1,595). Następnie, po przymocowaniu tych dwóch odmiennych filmów do obiektywu aparatu, wykonano zdjęcia zilustrowane na rys. 2G (oryginalne zdjęcie wykonane bez filmu pokazane jest na rys. S5). Rysunek 2H pokazuje, że folia hybrydowa OP-LENS (Δ n = 0,003) zapewnia wyraźniejszy obraz z mniejszym zamgleniem niż podłoże hybrydowe SU8-LENS (Δn = 0,185). Wynik ten oznacza, że podłoże hybrydowe o dobrze dopasowanych współczynnikach załamania światła może zapobiec zakłóceniom pola widzenia użytkownika.
Charakterystyka wyświetlacza bezprzewodowego na podłożu hybrydowym
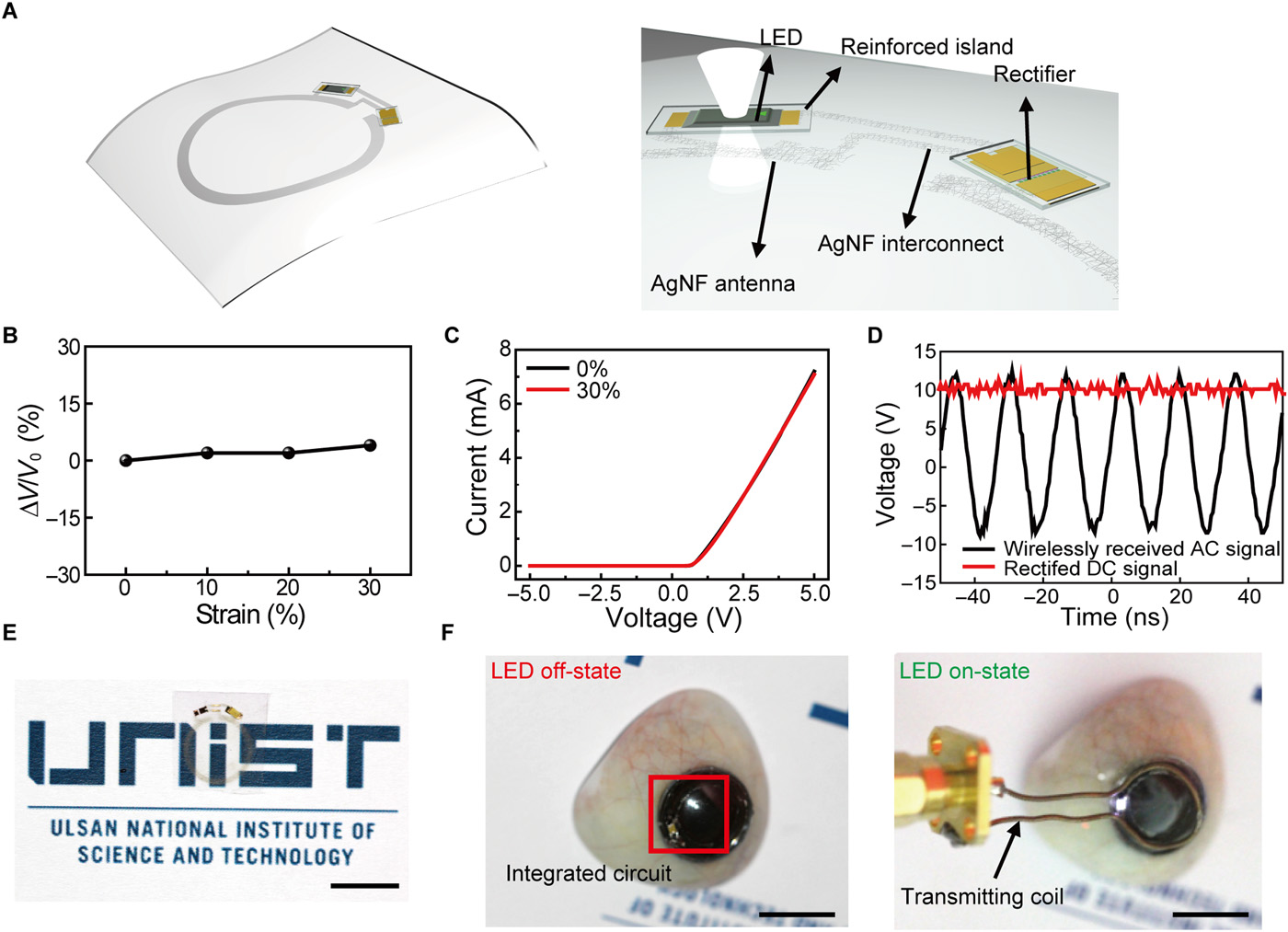
Zbadano właściwości elektryczne i mechaniczne wyświetlacza bezprzewodowego wytwarzanego na soczewce kontaktowej przy użyciu podłoża hybrydowego, jak pokazano na rys. 3. Ten bezprzewodowy wyświetlacz składał się z trzech elementów elektronicznych (anteny, prostownika i piksela LED), a te trzy części zostały zintegrowane i wykonane na warstwie protektorowej Cu o grubości 800 nm osadzonej na waflu Si. Po pokryciu warstwy Cu folią parylenową o grubości 500 nm, diody Si i SiO2Kondensatory oparte były połączone szeregowo jako obwód prostowniczy. Następnie piksel LED został przyklejony za pomocą srebrnego kleju epoksydowego. Po utworzeniu rozciągliwej anteny i interkonektów, lokalne wzory polimeru optycznego (grubość, ~ 50 μm) selektywnie pokrywały tylko zintegrowaną formę prostownika i diody LED i pozostawiały antenę i obszary szczątkowe odkryte. Po odlaniu elastycznej warstwy silikonowej (grubość, ~100 μm), usunięciu warstwy protektorowej Cu za pomocą trawienia na mokro i odwróceniu powstałej folii, zakończono tworzenie wyświetlacza bezprzewodowego na podłożu hybrydowym, gdzie prostownik i dioda LED zostały osadzone wewnątrz wzmocnionego obszaru (OP) oraz anteny i interkonektów wewnątrz obszaru sprężystego (LENS), odpowiednio. Więcej szczegółów na temat projektu i wytwarzania obwodu bezprzewodowego opisano na rysunkach. S6 i S7 oraz w materiałach i metodach. Rysunek 3A ilustruje schematyczny układ tego wyświetlacza bezprzewodowego.
Ryc. 3 Bezprzewodowy obwód wyświetlacza na podłożu hybrydowym.
(A) Schematyczny obraz obwodu wyświetlania bezprzewodowego. Prostownik i dioda LED znajdują się we wzmocnionych regionach. Przezroczysta, rozciągliwa antena i interkonekty oparte na AgNF znajdują się w elastycznym obszarze. (B) Względna zmiana napięcia nadawanego przez antenę w funkcji przyłożonego odkształcenia. (C) Charakterystyka diody Si na podłożu hybrydowym przez zastosowanie 0 i 30% odkształcenia rozciągającego. (D) Właściwości rektyfikowane prostownika. (E) Zdjęcie wyświetlacza bezprzewodowego na podłożu hybrydowym. Pasek skali, 1 cm. (F) Zdjęcia (po lewej, w stanie wyłączonym; po prawej, w stanie włączonym) działającego wyświetlacza bezprzewodowego z kształtem soczewki umieszczonym na sztucznym oku. Podziałki, 1 cm.
Tutaj zastosowano ciągłe sieci nanowłókien 1D, ultralong Ag (AgNF) jako rozciągliwe i przezroczyste elektrody do anteny i interkonektów. Frakcja o wyższej powierzchni, co oznacza większą gęstość AgNF, może być tworzona przez elektroprzędzenie przez dłuższy czas, a rys. S8A kreśli Rs oraz transmitancja optyczna tych sieci AgNF w funkcji ułamka powierzchniowego. Zarówno Rs i przepuszczalność zmniejszyła się, ponieważ zwiększyły się ich ułamki powierzchniowe. Sieci AgNF o ułamku powierzchni 0,2 miały niski Rs wartość 0,3 om/kw. (przy przepuszczalności 72%). Ponadto sieci AgNF wykazywały dobrą rozciągliwość mechaniczną (z Δ R/R0 mniej niż 10% pod naprężeniem rozciągającym 30%), jak pokazano na rys. S8B. Tak więc próbka ta wykazała doskonałą wytrzymałość mechaniczną jako formę struktury anteny na krzywoliniowych powierzchniach, takich jak soczewki kontaktowe. Sieci AgNF (maksymalna grubość, 2 μm) zostały wzorowane dla anteny o strukturze jednopętlowej (średnica anteny, 12 mm; szerokość, 0,5 mm), jak pokazano na rys. 3A. Ta antena z pojedynczą pętlą inteligentnej soczewki, która może znajdować się poza źrenicą oka osoby (średnica źrenicy, ~ 6 mm), zapobiega zakłóceniom pola widzenia użytkownika. Rysunek S8C przedstawia wydajność przenoszenia mocy tej anteny mierzoną w odległości 5 mm od cewki nadawczej, a antena najefektywniej pochłaniała energię RF na częstotliwości 50 MHz, przy wydajności przenoszenia mocy 21,5%. Ponadto antena otrzymała wystarczające napięcie (ponad 10 V), aby bezprzewodowo włączyć diody LED na częstotliwości 50 MHz (rys. S8D). Ze względu na wyjątkową rozciągliwość sieci AgNF, antena wewnątrz elastycznego obszaru inteligentnej soczewki kontaktowej miała stabilną wydajność przy 50 MHz z nieznaczną degradacją odbioru mocy, nawet po rozciągnięciu mechanicznym do 30% w odkształceniu rozciągającym (rys. 3B).
W celu konwersji bezprzewodowo przesyłanego prądu przemiennego na prąd stały, prostownik musi być zintegrowany z anteną. Prostownik składał się z diod nanomembranowych Si połączonych szeregowo kondensatorem, a charakterystykę poszczególnych urządzeń, o wymiarach 1,8 × 0,8 mm, opisano na rys. S9. Prostownik ten został osadzony wewnątrz wzmocnionego obszaru soczewki i umieszczony na zewnątrz źrenicy, gdzie nie zakłócałby pola widzenia użytkownika. Rysunek 3C pokazuje, że diody Si w tym prostowniku miały znikomą zmianę w ich wydajności elektrycznej nawet podczas stanu rozciągania (30% w odkształceniu rozciągającym) z powodu hybrydowego podłoża. Wynik ten dowodzi, że podłoże hybrydowe może chronić zwykłą elektronikę przed pęknięciami mechanicznymi. Ponadto prostownik przekształca sygnał prądu przemiennego przy 50 MHz w polaryzację DC 10 VRms (Ryc.3D).
Wykonany bezprzewodowy system wyświetlania, w tym antena, prostownik i dioda LED, wykorzystujący podłoże hybrydowe, jest rozciągliwy, ale jest płaski, jak pokazano na rys. 3E. Ta płaska i rozciągliwa próbka może być formowana w kształt soczewki kontaktowej, jak pokazano na rys. S10 i film S1. Rysunek 3F pokazuje powstałą miękką soczewkę kontaktową (po formowaniu) na sztucznym oku. Powstała inteligentna soczewka kontaktowa może odbierać bezprzewodowo sprzężone indukcyjnie zasilanie prądem przemiennym z cewki nadawczej (na 50 MHz) w odległości 5 mm. Następnie przesyłany sygnał prądu przemiennego można wyprostować przez półfalowy obwód prostowniczy do zasilania prądem stałym, aby włączyć piksel LED (rys. 3F i film S2). Ponieważ elastyczny obszar inteligentnej soczewki kontaktowej pochłania większość przyłożonego naprężenia, zintegrowane urządzenia mogą działać niezawodnie w postaci miękkich soczewek kontaktowych.
Wykrywanie glukozy ze zintegrowanymi inteligentnymi soczewkami kontaktowymi
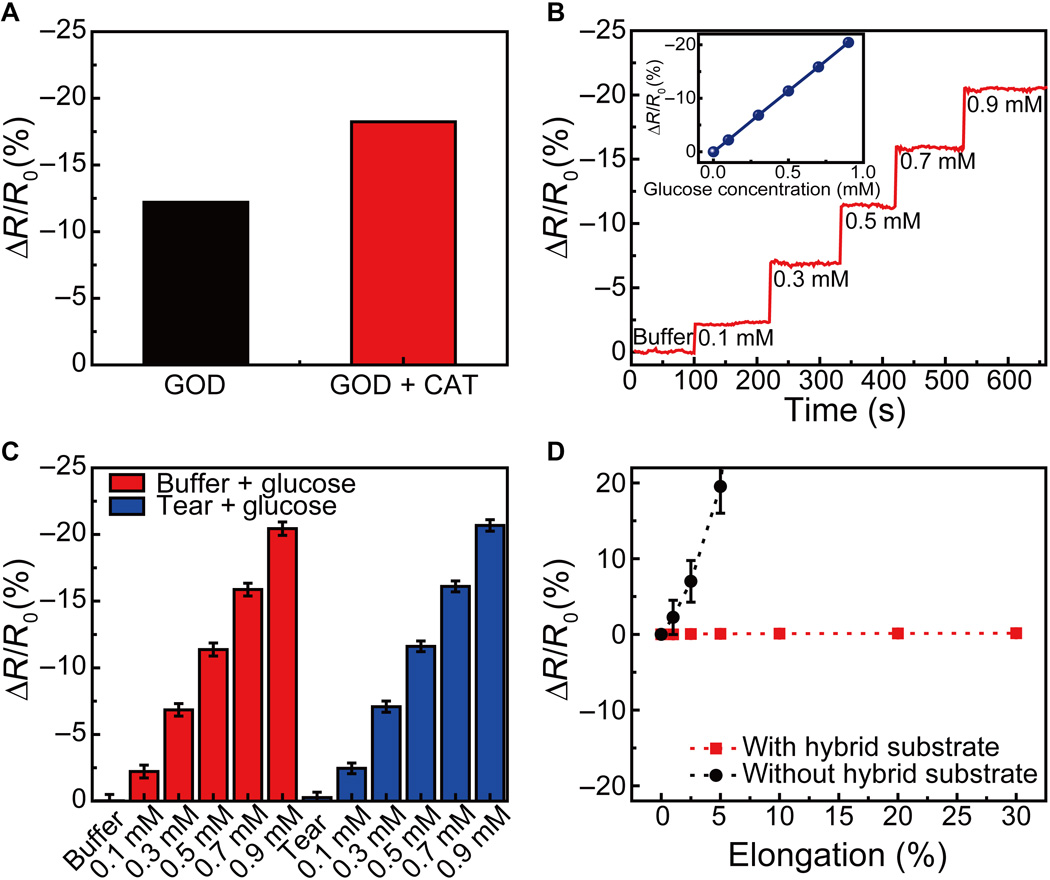
Bezprzewodowy wyświetlacz został następnie zintegrowany z czujnikiem glukozy, aby wytworzyć miękką, inteligentną soczewkę kontaktową, która może reagować na zmiany poziomu glukozy i jednocześnie wyświetlać informacje o wykrywaniu za pomocą piksela LED (rys. 1C). Głównym mechanizmem wykrywania glukozy w tym systemie jest to, że w celu selektywnego i czułego wykrywania glukozy oksydaza glukozowa (GOD; β-d-glukoza z Aspergillus niger) została unieruchomiona na powierzchni grafenu za pomocą łącznika pirenu poprzez interakcję układania π-π (35, 36). Część, w której Bóg jest związany z pirenem przez wiązanie amidowe, została wygenerowana w wyniku reakcji substytucji nukleofilowej N-hydroksysukcynimidu (36). Gdy glukoza przechodzi przez kanał grafenowy tego czujnika, może być utleniana przez BOGA. Po utlenieniu zredukowany Bóg może zostać ponownie utleniony przez reakcję z cząsteczkami tlenu, co powoduje powstanie nadtlenku wodoru jako produktu ubocznego. Ten nadtlenek wodoru jest również rozkładany, wytwarzając tlen, protony (jon H) i elektrony (14, 16, 37). Protony powodują dodatni efekt przenoszenia ładunku kanału grafenowego (typu p). Główne reakcje, które zaszły na kanale grafenowym, przedstawiono na ryc. S11. Ponieważ gęstość nośnika głównego jest proporcjonalna do stężenia glukozy, możemy wykryć względną zmianę oporności (Δ R/R+0) czujnika w funkcji stężenia glukozy generowanego w wyniku powyższych procesów reakcji (14, 38). Jednak ciągłe tworzenie H2O2 może degradować aktywność enzymatyczną GOD, obniżając czułość tego czujnika glukozy. Dlatego, aby usunąć H2O2 natychmiast, katalaza (CAT), która może rozkładać H2O2 na H2O i O2, został unieruchomiony z Bogiem na powierzchni kanału grafenowego (39). Zastosowanie CAT poprawiło czułość czujnika poprzez zwiększenie aktywności enzymatycznej Boga (rys. 4A). Średni poziom glukozy łez dla normalnych ludzi mieści się w zakresie od 0,2 do 0,6 mM, ale średnia ta może przekraczać 0,9 mM dla osób z cukrzycą (40), a ten czujnik może wykryć te szerokie zakresy (ryc. 4B). Względna zmiana rezystancji (Δ R/R0) tego czujnika zmniejszało się liniowo wraz ze stężeniem glukozy, jak pokazano na wstawce ryc. 4B. Czas reakcji czujnika jest definiowany jako czas wymagany do osiągnięcia przez czujnik 90% odpowiedzi. Dlatego czas reakcji jest mierzony jako ~ 1,3 s, jak pokazano na rys. S12. Ponadto czułość jest definiowana jako nachylenie krzywej kalibracyjnej (wstawka rys. 4B), więc czułość oblicza się jako około -22,72% / mM. Zmierzony stosunek sygnału do szumu (SNR) przy 0,1 mM wynosił 23,87, a minimalne wykrywalne stężenie (w przypadku SNR ~3) oszacowano w przybliżeniu na około 12,57 μM. Ponieważ ludzkie łzy zawierają różne gatunki oprócz glukozy, selektywność tego czujnika do glukozy została zbadana przy użyciu (i) buforowanego roztworu i (ii) roztworu sztucznych łez. Po dodaniu glukozy w pożądanych stężeniach do tych dwóch roztworów, odpowiedź (Δ R/R0) tego czujnika porównano z tymi dwoma przypadkami. Odchylenie od reakcji czujnika (Δ R/R0) nie było istotne dla przypadków roztworów buforowanych lub łzowych, jak pokazano na ryc. 4C, co wskazuje, że inne gatunki we łzach (oprócz glukozy) miały znikomą interferencję z tym czujnikiem glukozy. Ponadto czujnik glukozy zintegrowany z miękką soczewką kontaktową został rozciągnięty, a jego odpowiedź została zmierzona podczas rozciągania. Rysunek 4D pokazuje, że czujnik glukozy z podłożem hybrydowym ma nieistotną zmianę w swojej odporności na odkształcenie rozciągające do 30%, w przeciwieństwie do czujnika glukozy na nagiej warstwie elastomerowej (bez użycia podłoża hybrydowego). Pomimo zastosowania miękkiej soczewki, umiejscowienie tego czujnika na wzmocnionej części podłoża hybrydowego zapobiega jego uszkodzeniu przez mechaniczne odkształcenia miękkiej soczewki kontaktowej.
Rys. 4 Charakterystyka czujnika glukozy.
(A) Różnica w odpowiedzi między stężeniami glukozy wynoszącymi 0,1 i 0,9 mM dla czujnika z funkcjonalizacją GOD (czarny) i funkcjonalizacją GOD-CAT (czerwony). (B) Ciągłe monitorowanie w czasie rzeczywistym zgodnie ze stężeniami glukozy (wstawka, krzywe kalibracyjne czujnika glukozy). (C) Odpowiedź elektryczna czujników z różnymi roztworami (czerwony, roztwór buforowy; niebieski, roztwór sztucznego rozdarcia). Każdy punkt danych wskazuje średnią dla 10 próbek, a słupki błędu reprezentują SD. (D) Względne zmiany rezystancji czujnika glukozy w funkcji odkształcenia rozciągającego (czerwony, czujnik na podłożu hybrydowym; czarny, czujnik na folii elastomerowej bez użycia podłoża hybrydowego).
Ten czujnik glukozy został zintegrowany z wyświetlaczem bezprzewodowym (piksel LED, obwód prostowniczy i antena) przy użyciu hybrydowego podłoża jako w pełni funkcjonalnej inteligentnej soczewki kontaktowej. Po wytworzeniu wyświetlacza bezprzewodowego na podłożu hybrydowym, warstwa protektorowa Cu została wytrawiona w celu rozwarstwienia próbki. Następnie warstwa parylenu została częściowo wytrawiona w celu pasywacji całego regionu urządzenia, z wyjątkiem części kanałowej czujnika do wykrywania roztworu glukozy. Kanał grafenowy został przeniesiony na ten układ scalony. Następnie te zintegrowane elementy zostały osadzone w miękkiej soczewce kontaktowej przy użyciu procesu formowania (film S1). Podczas tego etapu formowania kanał grafenowy został otwarty i miejscowo odkryty przez materiał soczewki (elastomer silikonowy) w celu fizycznego kontaktu kanału z łzami. Ostatecznie GOD i CAT zostały unieruchomione na powierzchni grafenu, aby służyć jako czujnik glukozy. Rysunek 5 (A i B) przedstawia odpowiednio ilustrację schematyczną i zdjęcie w pełni zintegrowanej soczewki kontaktowej. Elektrody i urządzenia oparte na AgNF w powstałej inteligentnej soczewce kontaktowej są pasywowane przez warstwę parylenową, tak że ta warstwa pasywacyjna parylenu, jako bariera dyfuzyjna, zapobiega wyciekowi AgNF i jednocześnie zapewnia ochronę AgNF przed płynem łzowym (41). Jak pokazano na rys. 5C, powstała soczewka może zapobiegać zakłóceniom pola widzenia użytkownika, umieszczając nieprzezroczyste elementy (diody LED i wzory metalowe) poza ludzką źrenicą i dopasowując współczynniki załamania wzmocnionego materiału i elastomeru silikonowego z nieznacznym odchyleniem (Δn = 0,003). Długoterminowa stabilność tej inteligentnej soczewki została zbadana pod kątem powtarzalności podczas wielokrotnego użycia, przechowując w sztucznym roztworze łez przez okres do 48 godzin. Występuje znikoma degradacja odpowiedzi nawet po 48 godzinach, co sugeruje, że enzymy utrzymują swoją aktywność przez co najmniej 48 godzin (ryc. S13A). Ponadto obiektyw ten wykazywał prawie stałe napięcia wyjściowe przez prostownik antenowy nawet po 48 godzinach, ponieważ są one pasywowane przez podłoże hybrydowe i parylen, który może działać jako bariera dyfuzyjna (rys. S13B). Ponadto zbadano jego stabilność mechaniczną wobec cyklicznych odkształceń. Po 5000 cyklach rozciągania i zwalniania przy naprężeniu rozciągającym 30% inteligentna soczewka kontaktowa działała stabilnie z nieznaczną degradacją (rys. S13C). Ponieważ średni poziom glukozy łez u pacjentów z cukrzycą na czczo zwykle przekracza 0,9 mM, a stężenie dla osób na czczo bez cukrzycy wynosi poniżej 0,6 mM (39), w naszym obwodzie wybrano stężenie glukozy 0,9 mM jako próg do zdiagnozowania cukrzycy ze wskazaniem włączenia / wyłączenia LED. Próg ten można dostroić po prostu zmieniając rezystancję czujnika. Wraz ze wzrostem stężenia glukozy w płynie łzowym zmniejsza się rezystancja czujnika. To zmniejszenie rezystancji czujnika zmniejsza rezystancję obwodu równoległego diody LED i czujnika (rys. 1B). Jednak rezystancja innych elementów w tym systemie pozostaje niezmieniona. Powoduje to zmniejszenie polaryzacji przyłożonej do obwodu równoległego diody LED i czujnika w warunkach stale przyłożonego napięcia. Dlatego odchylenie zastosowane do piksela LED i luminancja diody LED zmniejszają się wraz ze wzrostem stężenia glukozy aż do progu (rys. S14). Gdy stężenie glukozy przekracza 0,9 mM, piksel ten wyłącza się, ponieważ odchylenie przyłożone do diody LED staje się niższe niż napięcie wyłączania. Rysunek 5D pokazuje żywego królika noszącego te inteligentne soczewki kontaktowe do testu in vivo. Po założeniu tej miękkiej soczewki na oko królika byliśmy w stanie bezprzewodowo monitorować wzrost stężenia glukozy powyżej progu, obserwując działanie włączania / wyłączania diody LED. Przy stężeniu glukozy większym niż 0,9 mM dioda LED wyłączyła się, jak pokazano na prawym obrazku rys. 5D i filmie S3. Królik nie wykazywał oznak nienormalnego zachowania, a ta inteligentna soczewka pozostała stabilna podczas powtarzających się mrugnięć oczami. Stabilny stan inteligentnych soczewek kontaktowych został potwierdzony przez operacje z wyższym transferem mocy (film S3). Wyższa moc indukuje wzrost prądu w diodzie LED, aby ją włączyć, chociaż rezystancja czujnika jest zmniejszona przez glukozę. W związku z tym piksel LED wyłączył się, ponieważ stężenie glukozy przekroczyło próg, a nie z powodu uszkodzenia obwodu. Konstrukcja jest taka, że dioda LED wyłącza się po wykryciu wysokiego poziomu glukozy, co jest sprzeczne z intuicją. Dlatego ulepszenie projektu systemu inteligentnych soczewek, który zapewnia intuicyjny status w celu wsparcia użyteczności, stanowi obiecujący obszar dla przyszłych prac (na przykład monitorowanie poziomu biomarkerów za pomocą smartfona). Ponadto wytwarzanie ciepła monitorowano za pomocą kamery termowizyjnej podczas bezprzewodowej pracy tego obiektywu (rys. 5E i film S4). Chociaż królik nosił bezprzewodowo działający obwód soczewki, temperatura tego urządzenia soczewkowego była utrzymywana na poziomie ~ 37 ° C bez znaczącego wytwarzania ciepła. Chociaż bezprzewodowe przeniesienie mocy z cewki nadawczej do obiektywu zwiększyło temperaturę tej cewki nadawczej do ~42°C, czyli nieco więcej niż temperatura otoczenia, jej funkcja bezprzewodowa uniemożliwiła tej cewce dotknięcie oka lub powieki królika z przerwą ~5 mm. Ponadto, zgodnie z wynikami symulacji współczynnika absorpcji swoistej (SAR) dla osoby, maksymalna wartość SAR naszego inteligentnego systemu soczewek kontaktowych wynosiła 1,399 W/kg (rys. S15), która jest znacznie niższa niż wartość regulacyjna (10 W/kg) (42).
Rys. 5 Miękkie, inteligentne soczewki kontaktowe do wykrywania glukozy.
(A) Schematyczny obraz miękkiej, inteligentnej soczewki kontaktowej. Prostownik, dioda LED i czujnik glukozy znajdują się na wzmocnionych obszarach. Przezroczysta, rozciągliwa antena i interkonekty oparte na AgNF znajdują się w elastycznym obszarze. (B) Zdjęcie wykonanej miękkiej, inteligentnej soczewki kontaktowej. Pasek skali, 1 cm. (C) Zdjęcie inteligentnej soczewki kontaktowej na oku manekina. Pasek podziałki, 1 cm. (D) Fotografie z badania in vivo na żywym króliku przy użyciu miękkiej, inteligentnej soczewki kontaktowej. Po lewej: Stan włączenia diody LED w miękkiej, inteligentnej soczewce kontaktowej zamontowanej na oku królika. Środek: Wstrzyknięcie płynów łzowych o stężeniu glukozy 0,9 mM. Po prawej: Stan wyłączenia diody LED po wykryciu zwiększonego stężenia glukozy. Podziałki, 1 cm. (E) Testy termiczne, gdy żywy królik nosi działające miękkie, inteligentne soczewki kontaktowe. Podziałki, 1 cm.
DYSKUSJA
Podsumowując, opracowaliśmy metodę wytwarzania miękkich, inteligentnych soczewek kontaktowych, które mogą monitorować poziom glukozy we łzach, aby wskazać stan cukrzycy w czasie rzeczywistym za pomocą wyświetlacza z operacjami bezprzewodowymi. W przypadku tej inteligentnej soczewki elementy elektroniczne (tj. czujnik glukozy, piksel LED, obwód prostownika i rozciągliwa, przezroczysta antena) zostały zintegrowane z mechanicznym przestrajanym podłożem hybrydowym z dobrze dobranymi współczynnikami załamania światła dla wysokiej przezroczystości optycznej i niskiego zamglenia. Po uformowaniu go do okrągłego kształtu miękkiej soczewki kontaktowej, zintegrowany system elektroniczny działał niezawodnie podczas odkształceń mechanicznych, w tym zginania i rozciągania. To szybkie podejście do formowania, wraz z konwencjonalnymi etapami przetwarzania (na przykład fotolitografią i metalizacją przez odparowanie), może stanowić jego potencjał do masowej produkcji na dużą skalę. Testy in vivo z wykorzystaniem żywego królika, w tym monitorowanie zmiany temperatury w oku królika, dostarczyły istotnej obietnicy przyszłych inteligentnych soczewek kontaktowych do nieinwazyjnego monitorowania opieki zdrowotnej przy użyciu ludzkich oczu i łez.
MATERIAŁY I METODY
Przygotowanie podłoży hybrydowych
W przypadku podłoża hybrydowego odparowano folię Cu o grubości 800 nm jako warstwę protektorową na waflu Si. Polimer optyczny (SPC-414, EFiRON) został powlekany spinem (1500 obr./min przez 30 s) o grubości 50 μm i fotolitograficznie wzorowany jako części wzmocnione. Następnie powlekano również elastyczną bazą mieszającą polimerową (elastofilcon A, CooperVision) i środkiem utwardzającym o stosunku 10:1 (1000 obr./min przez 30 s) o grubości 100 μm i utwardzano w temperaturze 100°C przez 1 godzinę. Następnie warstwę protektorową Cu wytrawiono rozcieńczonym roztworem trawiącym FeCl3/HCl/H2O [1:1:20 (v/v)] w celu rozwarstwienia podłoża hybrydowego z płytki Si.
W przypadku podłoża hybrydowego opartego na SU8 SU8 3050 (MicroChem Corp.) został powlekany spinem (3000 obr./min przez 30 s) do grubości 50 μm i wzorzysty jako części wzmocnione. Kolejne kroki były identyczne z hybrydowym podłożem na bazie polimeru światłowodowego.
Osadzanie podłoża hybrydowego lub układu scalonego w soczewce kontaktowej
W przypadku struktur osadzonych podłoże hybrydowe lub obwód wytworzony na podłożu hybrydowym umieszczono w formie soczewki kontaktowej. Następnie materiał soczewek kontaktowych został wypełniony i utwardzony termicznie w temperaturze 100°C przez 1 godzinę, z naciskiem 313 kPa. Po utwardzeniu podłoże hybrydowe lub układ scalony osadzony w soczewce kontaktowej został odłączony od formy.
Wytwarzanie wyświetlacza bezprzewodowego na inteligentnych soczewkach kontaktowych
Aby zmontować rozciągliwą i przezroczystą antenę do bezprzewodowego przełączania zasilania, AgNF były jednocześnie elektroprzędzone na próbce, w której wyprodukowano obwód prostownika. Następnie elektroprzędzone AgNF wzorowano za pomocą fotolitografii i procesu trawienia na mokro. Następnie piksel LED został połączony z obwodem srebrnym klejem epoksydowym. Następnie na próbce wyprodukowano podłoże hybrydowe, a następnie wytrawiono warstwę protektorową w celu rozwarstwienia wyświetlacza bezprzewodowego. Proces formowania kształtu soczewki kontaktowej był identyczny z osadzaniem podłoża hybrydowego lub układu scalonego w soczewce kontaktowej.
Wytwarzanie czujnika glukozy
W celu scharakteryzowania czujnika glukozy, na waflu Si z warstwą tlenku termicznego o grubości 300 nm (do pomiarów elektrycznych), Cr / Au (3: 100 nm), który służył jako źródło i odpływ, został odparowany i ukształtowany przez fotolitografię. Następnie warstwa grafenu zsyntetyzowana przez chemiczne osadzanie z fazy gazowej (CVD) została przeniesiona na próbkę i ukształtowana przez fotolitografię, aby jednocześnie utworzyć kanał (szerokość, 300 μm; długość, 500 μm). Następnie warstwa SU8 została ukształtowana tak, aby otwierała tylko regiony kanału, aby funkcjonalizować kanał grafenowy. Aby unieruchomić GOD i CAT na kanale grafenowym w celu skutecznego wykrywania glukozy, wytworzony czujnik umieszczono w estrze bursztynimidylowym kwasu pirenobutanowego (1 mg / ml; Sigma-Aldrich) w metanolu przez 1 godziny w temperaturze pokojowej, a następnie czyszczenie czystym metanolem. Następnie czujnik umieszczono w GOD (2 mg / ml; Sigma-Aldrich) i CAT (10,2 mg/ml; Sigma-Aldrich) w wodzie dejonizowanej (DI) przez 0 godzin w temperaturze pokojowej, spłukane czystą wodą DI, a następnie wysuszone azotem.
W celu integracji czujnika glukozy z wyświetlaczem bezprzewodowym, bezprzewodowy wyświetlacz inteligentnej soczewki kontaktowej został rozwarstwiony podczas obsługi płytki poprzez wytrawienie warstwy Cu. Następnie warstwa parylenu została częściowo wytrawiona w celu zintegrowania elektrod i kanału grafenowego. Następnie kanał grafenowy został przeniesiony, tworząc kanał wykrywający, a osadzenie tego bezprzewodowego czujnika wyświetlania w soczewce kontaktowej przeprowadzono w taki sam sposób, jak osadzenie wyświetlacza bezprzewodowego w soczewce kontaktowej po pokryciu kanału grafenowego silanowaną maską polidimetylosiloksanową. Procedura unieruchomienia czujnika glukozy była identyczna z powyższym procesem.
Eksperymenty na królikach
Wszystkie badania in vivo przeprowadzono zgodnie z wytycznymi National Institutes of Health dotyczącymi opieki i wykorzystania zwierząt laboratoryjnych oraz za zgodą Komitetu Instytutu Opieki i Wykorzystania Zwierząt Narodowego Instytutu Nauki i Technologii w Ulsan (UNIST) (UNISTIACUC-16-19). Komitet Instytutu Opieki i Wykorzystania Zwierząt UNIST był komitetem oceny etycznej. Do eksperymentów in vivo użyto samca białego królika nowozelandzkiego.
Podziękowania
Finansowania: Prace te były wspierane przez Ministerstwo Nauki i ICT oraz Ministerstwo Handlu, Przemysłu i Energii Korei za pośrednictwem National Research Foundation (2016R1A2B3013592 i 2016R1A5A1009926), Programu Rozwoju Technologii Nanomateriałowych (2015M3A7B4050308 i 2016M3A7B4910635), Convergence Technology Development Program for Bionic Arm (NRF-2017M3C1B2085316), Industrial Technology Innovation Program (10080577) oraz Pioneer Research Center Program (NRF-2014M3C1A3001208). Autorzy dziękują również CooperVision Awards i doceniają wsparcie finansowe w ramach Programu Rozwoju (1.170009.01) finansowanego przez UNIST. Wkład autora: J.P., J.K. i S.-Y.K. przeprowadził eksperymenty, przeanalizował dane i napisał rękopis. W.H.C., J.J., Y.-G.P., K.N., Y.-T.K. i J.H.H. przeprowadzili eksperymenty. C.Y.L. przyczynił się do planowania projektu. J.H.L., F.B. i J.-U.P. nadzorował wszystkie fazy badań i poprawiał rękopis. Wszyscy autorzy dyskutowali i komentowali rękopis. Sprzeczne interesy: Wszyscy autorzy deklarują, że nie mają konkurencyjnych interesów. Dostępność danych i materiałów: Wszystkie dane potrzebne do oceny wniosków zawartych w artykule znajdują się w artykule i/lub materiałach uzupełniających. Dodatkowe dane związane z tym artykułem mogą być wymagane od autorów.
Materiały uzupełniające
Streszczenie
Materiały i metody uzupełniające
figa. S1. Etapy przetwarzania podłoża hybrydowego.
figa. S2. Analiza danych AFM.
figa. S3. Przepuszczalność optyczna (czarny) i zamglenie (czerwony) widma silikonowej warstwy elastomerowej.
figa. S4. Zmienność właściwości optycznych w stosunku do mechanicznego rozciągania podłoża hybrydowego (od 0 do 30% w odkształceniu rozciągającym).
figa. S5. Oryginalny obraz do testu fotograficznego w celu określenia przejrzystości podłoża hybrydowego.
figa. S6. Obwód wyświetlacza bezprzewodowego składający się z anteny, prostownika i piksela LED.
figa. S7. Procedury produkcyjne wyświetlacza bezprzewodowego na podłożu hybrydowym.
figa. S8. Charakterystyka rozciągliwej, przezroczystej elektrody AgNF jako anteny.
figa. S9. Charakterystyka diody Si i SiO2 kondensator.
figa. S10. Sekwencyjne obrazy schematyczne do przekształcania w kształt soczewki.
figa. S11. Mechanizm wykrywania glukozy na kanale grafenowym.
figa. S12. Powiększony wynik wykrywania w czasie rzeczywistym (przy pierwszym wykryciu poziomu glukozy) w celu weryfikacji czasu reakcji.
figa. S13. Stabilność inteligentnego systemu soczewek kontaktowych.
figa. S14. Zależność między stężeniem glukozy a luminancją diody LED.
figa. S15. Wynik symulacji SAR.
tabela S1. Porównanie z innymi nieinwazyjnymi technologiami monitorowania glikemii.
film S1. Procedura osadzania podłoża hybrydowego w soczewce kontaktowej.
film S2. Bezprzewodowa obsługa bezprzewodowego wyświetlacza o kształcie soczewki.
film S3. Test in vivo miękkich, inteligentnych soczewek kontaktowych do pracy bezprzewodowej.
film S4. Test in vivo miękkich, inteligentnych soczewek kontaktowych do badania wytwarzania ciepła.
Zasoby
ODNIESIENIA I UWAGI
1
T. Yokota, P. Zalar, M. Kaltenbrunner, H. Jinno, N. Matsuhisa, H. Kitanosako, Y. Tachibana, W. Yukita, M. Koizumi, T. Someya, Ultraelastyczna organiczna skóra fotoniczna. Sci. Adv. 2, E1501856 (2016).
2
B. C.-K. Tee, A. Chortos, A. Berndt, A. K. Nguyen, A. Tom, A. McGuire, Z. C. Lin, K. Tien, W.-G. Bae, H. Wang, P. Mei, H.-H. Chou, B. Cui, K. Deisseroth, T. N. Ng, Z. Bao, Organiczny mechanoreceptor cyfrowy inspirowany skórą. Science 350, 313–316 (2015).
3
J. Kim, G. A. Salvatore, H. Araki, A. M. Chiarelli, Z. Xie, A. Banks, X. Sheng, Y. Liu, J. W. Lee, K.-I. Jang, S. Y. Heo, K. Cho, H. Luo, B. Zimmerman, J. Kim, L. Yan, X. Feng, S. Xu, M. Fabiani, G. Gratton, Y. Huang, U. Paik, J. A. Rogers, Bezbateryjne, rozciągliwe systemy optoelektroniczne do bezprzewodowej optycznej charakterystyki skóry. Sci. Adv. 2, E1600418 (2016).
4
S. I. Park, D. S. Brenner, G. Shin, C. D. Morgan, B. A. Copits, H. U. Chung, M. Y. Pullen, K. N. Noh, S. Davidson, S. J. Oh, J. Yoon, K.-I. Jang, V. K. Samineni, M. Norman, J. G. Grajales-Reyes, S. K. Vogt, S. S. Sundaram, K. M. Wilson, J. S. Ha, R. Xu, T. Pan, T.-i. Kim, Y. Huang, M. C. Montana, J. P. Golden, M. R. Bruchas, R. W. Gereau IV, J. A. Rogers, Miękkie, rozciągliwe, w pełni wszczepialne zminiaturyzowane systemy optoelektroniczne do optogenetyki bezprzewodowej. Nat. Biotechnol. 33, 1280–1286 (2015).
5
C. Wang, D. Hwang, Z. Yu, K. Takei, J. Park, T. Chen, B. Ma, A. Javey, User-interactive electronic skin for instantaneous pressure visualization. Nat. Mater. 12, 899–904 (2013).
6
D.-H. Kim, J. Viventi, J. J. Amsden, J. Xiao, L. Vigeland, Y.-S. Kim, J. A. Blanco, B. Panilaitis, E. S. Frechette, D. Contreras, D. L. Kaplan, F. G. Omenetto, Y. Huang, K.-C. Hwang, M. R. Zakin, B. Litt, J. A. Rogers, Rozpuszczalne folie fibroiny jedwabiu do ultracienkiej konforemnej biozintegrowanej elektroniki. Nat. Mater. 9, 511–517 (2010).
7
H. Chu, H. Jang, Y. Lee, Y. Chae, J.-H. Ahn, Conforem, oparty na grafenie tryboelektryczny nanogenerator do elektroniki do noszenia z własnym zasilaniem. Nano Energy 27, 298–305 (2016).
8
D.-H. Kim, N. Lu, R. Ma, Y.-S. Kim, R.-H. Kim, S. Wang, J. Wu, S. M. Won, H. Tao, A. Islam, K. J. Yu, T.-i. Kim, R. Chowdhury, M. Ying, L. Xu, M. Li, H.-J. Chung, H. Keum, M. McCormick, P. Liu, Y.-W. Zhang, F. G. Omenetto, Y. Huang, T. Coleman, J. A. Rogers, Elektronika naskórka. Science 333, 838–843 (2011).
9
W. Gao, S. Emaminejad, H. Y. Y. Nyein, S. Challa, K. Chen, A. Peck, H. M. Fahad, H. Ota, H. Shiraki, D. Kiriya, D.-H. Lien, G. A. Brooks, R. W. Davis, A. Javey, W pełni zintegrowane matryce czujników do noszenia do multipleksowanej analizy potu in situ. Nature 529, 509–514 (2016).
10
J. G. McCall, T.-i. Kim, G. Shin, X. Huang, Y. H. Jung, R. Al-Hasani, F. G. Omenetto, M. R. Bruchas, J. A. Rogers, Wytwarzanie i zastosowanie elastycznych, multimodalnych urządzeń emitujących światło do optogenetyki bezprzewodowej. Nat. Protoc. 8, 2413–2428 (2013).
11
K.-I. Jang, S. Y. Han, S. Xu, K. E. Mathewson, Y. Zhang, J.-W. Jeong, G.-T. Kim, R. C. Webb, J. W. Lee, T. J. Dawidczyk, R. H. Kim, Y. M. Song, W.-H. Yeo, S. Kim, H. Cheng, S. I. Rhee, J. Chung, B. Kim, H. U. Chung, D. Lee, Y. Yang, M. Cho, J. G. Gaspar, R. Carbonari, M. Fabiani, G. Gratton, Y. Huang, J. A. Rogers, Wytrzymałe i oddychające formy rozciągliwej elektroniki z przylegającymi podłożami kompozytowymi do monitorowania przezskórnego. Nat. Commun. 5, 4779 (2014).
12
D. Kim, D. Kim, H. Lee, Y. R. Jeong, S.-J. Lee, G. Yang, H. Kim, G. Lee, S. Jeon, G. Zi, J. Kim, J. S. Ha, Podłączane do ciała i rozciągliwe multisensory zintegrowane z bezprzewodowo ładowalnymi urządzeniami do magazynowania energii. Adv. Mater. 28, 748–756 (2016).
13
N. M. Farandos, A. K. Yetisen, M. J. Monteiro, C. R. Lowe, S. H. Yun, Czujniki soczewek kontaktowych w diagnostyce oka. Adv. Healthc. Mater. 4, 792–810 (2015).
14
J. Kim, M. Kim, M.-S. Lee, K. Kim, S. Ji, Y.-T. Kim, J. Park, K. Na, K.-H. Bae, H. K. Kim, F. Bien, C. Y. Lee, J.-U. Park, Poręczne inteligentne systemy czujników zintegrowane z miękkimi soczewkami kontaktowymi do bezprzewodowej diagnostyki oczu. Nat. Commun. 8, 14997 (2017).
15
M. X. Chu, K. Miyajima, D. Takahashi, T. Arakawa, K. Sano, S.-i. Sawada, H. Kudo, Y. Iwasaki, K. Akiyoshi, M. Mochizuki, K. Mitsubayashi, Biosensor miękkich soczewek kontaktowych do monitorowania in situ poziomu glukozy łzowej jako nieinwazyjnej oceny poziomu cukru we krwi. Talanta 83, 960–965 (2011).
16
H. Yao, A. J. Shum, M. Cowan, I. Lähdesmäki, B. A. Parviz, Soczewka kontaktowa z wbudowanym czujnikiem do monitorowania poziomu glukozy łez. Biosens. Bioelektron. 26, 3290–3296 (2011).
17
A. R. Lingley, M. Ali, Y. Liao, R. Mirjalili, M. Klonner, M. Sopanen, S. Suihkonen, T. Shen, B. P. Otis, H. Lipsanen, B. A. Parviz, Jednopikselowy bezprzewodowy wyświetlacz soczewek kontaktowych. J. Mikromech. Mikroeng. 21, 125014 (2011).
18
G.-Z. Chen, I.-S. Chan, D. C. C. Lam, Pojemnościowy czujnik soczewek kontaktowych do ciągłego nieinwazyjnego monitorowania ciśnienia wewnątrzgałkowego. Siłowniki A Phys. 203, 112–118 (2013).
19
S. De Smedt, Nieinwazyjne monitorowanie ciśnienia wewnątrzgałkowego: aktualne spostrzeżenia. Clin. Oftalmol. 9, 1385–1392 (2015).
20
Y.-T. Liao, H. Yao, A. Lingley, B. Parviz, B. P. Otis, 3-μW czujnik glukozy CMOS do bezprzewodowego monitorowania łzy glukozy w soczewkach kontaktowych. IEEE J. Solid-State Circuits 47, 335–344 (2012).
21
D. Piso, P. Veiga-Crespo, E. Vecino, Nowoczesne urządzenia monitorujące ciśnienie wewnątrzgałkowe oparte na specyficznych dla aplikacji układach scalonych. J. Biomater. Nanobiotechnol. 3, 301–309 (2012).
22
J. Pandey, Y.-T. Liao, A. Lingley, R. Mirjalili, B. Parviz, B. P. Otis, W pełni zintegrowana soczewka kontaktowa zasilana technologią RF z jednoelementowym wyświetlaczem. IEEE Trans. Biomed. Obwody Syst. 4, 454–461 (2010).
23
M. Leonardi, P. Leuenberger, D. Bertrand, A. Bertsch, P. Renaud, Pierwsze kroki w kierunku nieinwazyjnego monitorowania ciśnienia wewnątrzgałkowego za pomocą wykrywającej soczewki kontaktowej. Inwestować. Oftalmol. Vis. Sci. 45, 3113–3117 (2004).
24
I. M. Graz, D. P. J. Cotton, A. Robinson, S. P. Lacour, Podłoże silikonowe z odciążeniem in situ do rozciągliwych tranzystorów cienkowarstwowych. Appl. Phys. Lett. 98, 124101 (2011).
25
R. M. Erb, K. H. Cherenack, R. E. Stahel, R. Libanori, T. Kinkeldei, N. Münzenrieder, G. Tröster, A. R. Studart, Lokalnie wzmocnione kompozyty polimerowe do elektroniki elastycznej. ACS Appl. Mater. Interfejsy 4, 2860–2864 (2012).
26
M. Kim, J. Park, S. Ji, S.-H. Shin, S.-Y. Kim, Y.-C. Kim, J.-Y. Kim, J.-U. Park, W pełni zintegrowane, bezramkowe macierze tranzystorowe wykorzystujące odwracalnie składane interkonekty i rozciągliwe podłoża origami. Nanoskala 8, 9504–9510 (2016).
27
A. Romeo, Q. Liu, Z. Suo, S. P. Lacour, Elastomeric substrates with embedded stiff platforms for stretchable electronics. Appl. Phys. Lett. 102, 131904 (2013).
28
S. Ji, B. G. Hyun, K. Kim, S. Y. Lee, S.-H. Kim, J.-Y. Kim, M. H. Song, J.-U. Park, Photo-patternable and transparent films using cellulose nanofibers for stretchable origami electronics. NPG Asia Mater. 8, e299 (2016).
29
R. Libanori, R. M. Erb, A. Reiser, H. Le Ferrand, M. J. Süess, R. Spolenak, A. R. Studart, Stretchable heterogeneous composites with extreme mechanical gradients. Nat. Commun. 3, 1265 (2012).
30
M.-S. Lee, K. Lee, S.-Y. Kim, H. Lee, J. Park, K.-H. Choi, H.-K. Kim, D.-G. Kim, D.-Y. Lee, S. Nam, J.-U. Park, High-performance, transparent, and stretchable electrodes using graphene–metal nanowire hybrid structures. Nano Lett. 13, 2814–2821 (2013).
31
B. W. An, B. G. Hyun, S.-Y. Kim, M. Kim, M.-S. Lee, K. Lee, J. B. Koo, H. Y. Chu, B.-S. Bae, J.-U. Park, Stretchable and transparent electrodes using hybrid structures of graphene–metal nanotrough networks with high performances and ultimate uniformity. Nano Lett. 14, 6322–6328 (2014).
32
J. Kim, M.-S. Lee, S. Jeon, M. Kim, S. Kim, K. Kim, F. Bien, S. Y. Hong, J.-U. Park, Highly transparent and stretchable field-effect transistor sensors using graphene–nanowire hybrid nanostructures. Adv. Mater. 27, 3292–3297 (2015).
33
J. Jang, B. G. Hyun, S. Ji, E. Cho, B. W. An, W. H. Cheong, J.-U. Park, Rapid production of large-area, transparent and stretchable electrodes using metal nanofibers as wirelessly operated wearable heaters. NPG Asia Mater. 9, e432 (2017).
34
H. G. Craighead, J. Cheng, S. Hackwood, New display based on electrically induced index-matching in an inhomogeneous medium. Appl. Phys. Lett. 40, 22–24 (1982).
35
K. Besteman, J.-O. Lee, F. G. M. Wiertz, H. A. Heering, C. Dekker, Enzyme-coated carbon nanotubes as single-molecule biosensors. Nano Lett. 3, 727–730 (2003).
36
R. J. Chen, Y. Zhang, D. Wang, H. Dai, Noncovalent sidewall functionalization of single-walled carbon nanotubes for protein immobilization. J. Am. Chem. Soc. 123, 3838–3839 (2001).
37
J. Liu, M. Agarwal, K. Varahramyan, Glucose sensor based on organic thin film transistor using glucose oxidase and conducting polymer. Sens. Actuators B Chem. 135, 195–199 (2008).
38
M. Ngoepe, Y. E. Choonara, C. Tyagi, L. K. Tomar, L. C. du Toit, P. Kumar, V. M. K. Ndesendo, V. Pillay, Integration of biosensors and drug delivery technologies for early detection and chronic management of illness. Sensors 13, 7680–7713 (2013).
39
S. Singh, M. McShane, Enhancing the longevity of microparticle-based glucose sensors towards 1 month continuous operation. Biosens. Bioelectron. 25, 1075–1081 (2010).
40
D. K. Sen, G. S. Sarin, Tear glucose levels in normal people and in diabetic patients. Br. J. Ophthalmol. 64, 693–695 (1980).
41
D. C. Rodger, J. D. Weiland, M. S. Humayun, Y.-C. Tai, Scalable high lead-count parylene package for retinal prostheses. Sens. Actuators B Chem. 117, 107–114 (2006).
42
IEEE, IEEE standard for safety levels with respect to human exposure to radio frequency electromagnetic fields, 3 kHz to 300 GHz, in IEEE Std C951-2005 (Revision of IEEE Std C951-1991) (IEEE, 2006), 238 pp.
43
H. Lee, T. K. Choi, Y. B. Lee, H. R. Cho, R. Ghaffari, L. Wang, H. J. Choi, T. D. Chung, N. Lu, T. Hyeon, S. H. Choi, D.-H. Kim, A graphene-based electrochemical device with thermoresponsive microneedles for diabetes monitoring and therapy. Nat. Nanotechnol. 11, 566–572 (2016).
44
A. Koh, D. Kang, Y. Xue, S. Lee, R. M. Pielak, J. Kim, T. Hwang, S. Min, A. Banks, P. Bastien, M. C. Manco, L. Wang, K. R. Ammann, K.-I. Jang, P. Won, S. Han, R. Ghaffari, U. Paik, M. J. Slepian, G. Balooch, Y. Huang, J. A. Rogers, A soft, wearable microfluidic device for the capture, storage, and colorimetric sensing of sweat. Sci. Transl. Med. 8, 366ra165 (2016).
45
T. Arakawa, Y. Kuroki, H. Nitta, P. Chouhan, K. Toma, S.-i. Sawada, S. Takeuchi, T. Sekita, K. Akiyoshi, S. Minakuchi, K. Mitsubayashi, Mouthguard biosensor with telemetry system for monitoring of saliva glucose: A novel cavitas sensor. Biosens. Bioelectron. 84, 106–111 (2016).
(0)Listy elektroniczne
eLetters to internetowe forum do bieżącej wzajemnej oceny. Składanie e-listów jest otwarte dla wszystkich. Listy elektroniczne nie są edytowane, sprawdzane ani indeksowane. Prosimy o zapoznanie się z naszymi Warunkami świadczenia usług przed wysłaniem własnego listu elektronicznego.
Zaloguj się, aby przesłać odpowiedźŻadne e-listy nie zostały jeszcze opublikowane dla tego artykułu.